
NYU Tandon prévoit un parc d'imprimantes 3D mobiles pour la construction et la réparation – Serveur d’impression
Des experts en robotique à la L'Université de New York (NYU) Tandon School of Engineering conçoivent un ensemble de robots équipés d'imprimantes 3D pour une construction autonome et mobile.
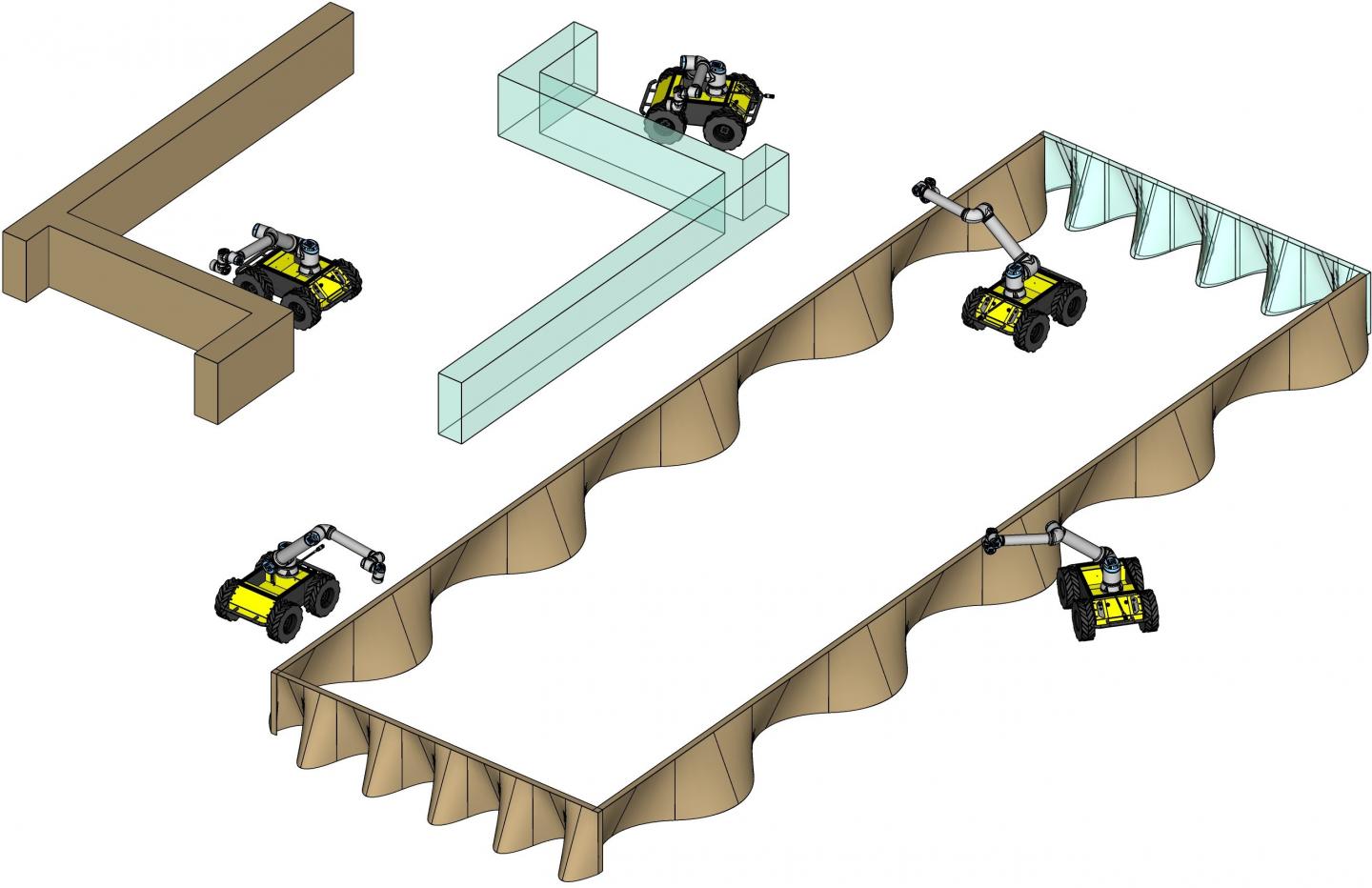
Plus précisément, les chercheurs se sont penchés sur la création de systèmes autonomes pour les imprimantes 3D connectées à la fin des bras robotiques. Ces bras seront attachés aux plates-formes itinérantes pour une mobilité totale. Les imprimantes 3D mobiles sont conçues pour fonctionner en équipe, selon un concept appelé fabrication additive collective (CAM). Grâce à l'apprentissage automatique et à l'intelligence artificielle, les robots peuvent constituer une unité capable d'effectuer divers travaux de construction utiles, tels que la réparation de ponts, de tunnels et d'autres structures civiques; ou même travailler dans les profondeurs de l'océan et les zones sinistrées. L’équipe de la NYU a également affirmé qu’il serait peut-être possible que les robots participent à des activités d’exploration spatiale à l’avenir.
Le projet de recherche est financé par une subvention de 1,2 million de dollars du Fondation nationale de la science (NSF), et se déroule au NYU Centre des sciences urbaines et du progrès (CUSPIDE). Chen Feng, professeur adjoint au département de génie civil et urbain de NYU Tandon et au département de génie mécanique et aérospatial, indique que
«Pour exploiter pleinement le potentiel de la fabrication additive collective, plusieurs frontières scientifiques doivent être repoussées, garantissant ainsi le déploiement optimal de plusieurs robots mobiles imprimant de grandes structures selon une conception virtuelle élaborée.»

Rendre la fabrication collective additive viable
L'équipe de recherche, composée de Chen Feng, de Maurizio Porfiri, de Ludovic Righetti et de Weihua Jin, est un groupe multidisciplinaire de professeurs des départements de génie civil et urbain, de génie mécanique et aérospatial, de génie électrique et électrique à l'Université de New York. Chaque membre se concentrera sur différents domaines relatifs à l’autonomie, au contrôle, aux systèmes temps réel et à la mise en réseau, qui sont considérés essentiel à la viabilité des robots FAO.
Le premier domaine est «Planification et localisation». Pour que les robots d’impression 3D puissent fonctionner ensemble, ils doivent pouvoir localiser en fonction de leurs positions respectives et des structures qu’ils construisent. Il est important que cela soit réalisé sans s'appuyer sur des systèmes de positionnement global, en particulier pour les applications extraterrestres, car ceux-ci ne sont précis qu'à quelques dizaines de mètres. Il est nécessaire que les ajustements de position soient rapides et précis à quelques millimètres. Feng abordera ce domaine particulier, expliquant que l'objectif est de fournir au robot précision, efficacité et adaptabilité à l'environnement et aux conditions en temps réel.
«Le robot doit être capable de se déplacer rapidement vers la zone d’impression, d’observer les conditions réelles – telles qu’un terrain accidenté, car le monde réel n’est pas planaire – puis de procéder immédiatement à des compensations», explique Feng. «Et si nous souhaitons un degré de précision plus élevé dans le domaine de la structure, plus vous êtes éloigné de la structure, moins vous en avez besoin. Cela impliquera un nouveau type de localisation proactive. "
Le deuxième domaine clé est le «contrôle prédictif du modèle». Il s’assure que la base mobile et le manipulateur sont suffisamment efficaces et stables pour prendre en charge une impression 3D rapide et de haute qualité pouvant s’adapter à l’environnement en temps réel. Les exemples incluent les variations inattendues ou indésirables des conditions réelles sur le site ou dans la tête de l’imprimante lorsqu’elle dépose du ciment ou un autre matériau. Ce sujet est confié à Righetti, qui travaillera au développement d'algorithmes de contrôle optimaux en temps réel pour chacune des imprimantes 3D mobiles, leur permettant de s'adapter à l'environnement.
«Chaque robot doit observer ce qui est imprimé, l’associer de manière autonome à la conception du projet et reconnaître instantanément si la structure imprimée s’est écartée de celle-ci et de combien et tout en décidant des actions à prendre pour assurer une l'impression de la structure », commente Righetti.
Coopération autonome entre imprimantes 3D
Enfin, les chercheurs se concentreront également sur «Impression et coordination». Il est nécessaire que le mouvement de plusieurs imprimantes 3D mobiles soit synchronisé en fonction des dessins des pièces à imprimer en 3D. Par conséquent, la structure en évolution réelle, telle qu’elle est imprimée en 3D, servira de carte pour la coordination physique des robots. Porfiri travaillera au développement d'un cadre mathématique permettant un tel niveau de coordination. Le cadre aidera les robots à planifier de manière autonome leurs actions dans l'environnement physique, où ils pourront simultanément imprimer en 3D une structure avec une efficacité accrue. Ceci est particulièrement important pour les robots s’ils poursuivent leurs activités de construction extraterrestres sur Mars, par exemple, car il n’existera pas de serveur distant suffisamment proche pour coordonner les robots manuellement.
Porfiri ajoute que «Contrairement aux drones volant en formation ou aux voitures autonomes qui se tiennent à distance, nos imprimantes mobiles laissent une empreinte unique dans l'environnement physique: l'objet à imprimer. Mon travail exploitera cette empreinte même pour établir des algorithmes efficaces de coordination et d'impression collective. ”
En outre, Jin contribuera aux efforts globaux de l’équipe en aidant à développer des matériaux composites adaptés à l’impression mobile de béton en 3D. Pour démontrer l'efficacité des algorithmes de contrôle d'imprimante 3D, l'équipe de recherche envisage d'utiliser les matériaux de béton récemment développés avec les robots FAO pour imprimer en 3D une structure à NYU Tandon. Le projet de recherche visera également à inclure les efforts des étudiants de NYU. Les étudiants pourront participer à un atelier de l'industrie sur la FAO et à une exposition publique en plein air. Ils auront également accès à une trousse pédagogique ouverte sur la FAO, à un concours de FAO de la maternelle à la 12e année et à des activités entrepreneuriales.
Impression 3D mobile
L'impression 3D mobile n'est pas un concept nouveau, plusieurs entreprises et institutions ayant exploré et intégré une robotique autonome et mobile dotée de capacités d'impression 3D.
Par exemple, Ambots, fournisseur de technologie d’assemblage et d’assemblage 3D basé dans l’Arkansas, a développé une classe de robots mobiles capables d'imprimer en 3D, qui, selon les fondateurs, vont créer un nouveau type d’usine numérique. Les machines compactes comprennent une imprimante 3D FDM / FFF et quatre roues omni, permettant aux Ambots de se déplacer sur les axes X et Y, avec deux capteurs de mouvement laser ADNS-9800 contrôlés via une connexion sans fil.
GXN Innovation, une filiale de recherche indépendante du bureau d'architecture danois 3XN, a également exploré comment faire Imprimantes 3D mobiles de manière autonome. En créant des piratages physiques et virtuels des imprimantes 3D existantes et en les inscrivant dans la mobilité, les recherches du groupe sont axées sur les défis mondiaux de la croissance démographique et du changement climatique, qui constituent une menace pour les bâtiments, les infrastructures et les villes à travers le monde.
Abonnez-vous à la Bulletin de l'industrie de l'impression 3D pour les dernières nouvelles en fabrication additive. Vous pouvez également rester connecté en nous suivant sur Twitter et nous aimer sur Facebook.
Vous recherchez une carrière dans la fabrication additive? Visite Travaux d'impression 3D pour une sélection de rôles dans l'industrie.
L'image présentée montre des robots collectifs de fabrication additive. Image via NYU Tandon.






Commentaires
Laisser un commentaire